核心产品
Products显示全部核心功能
FAS
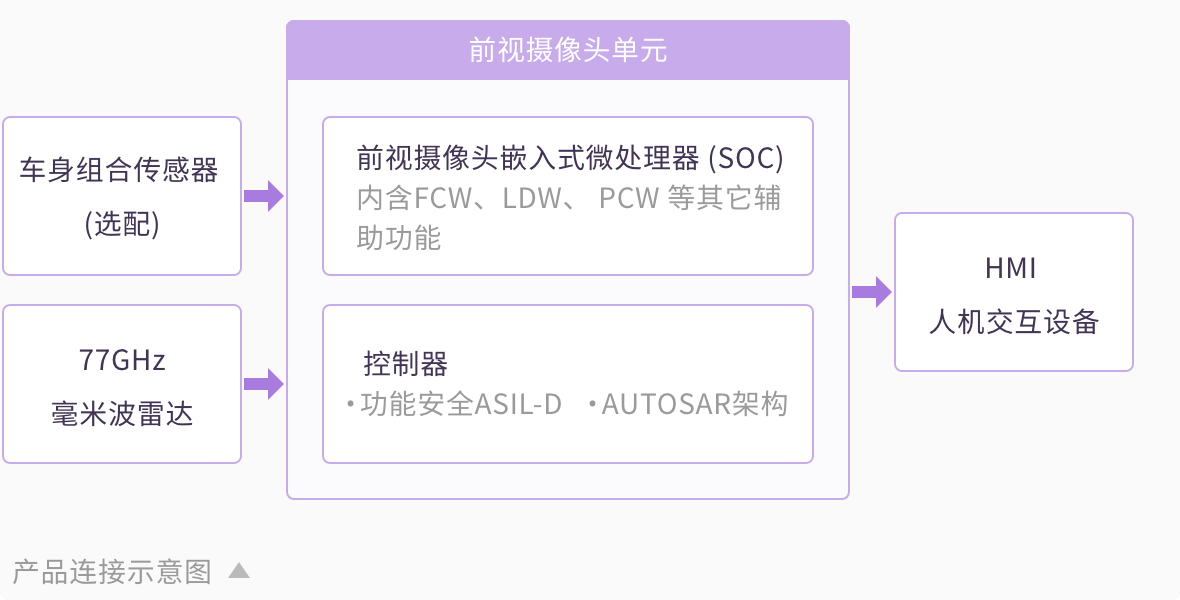
商用车前视辅助系统
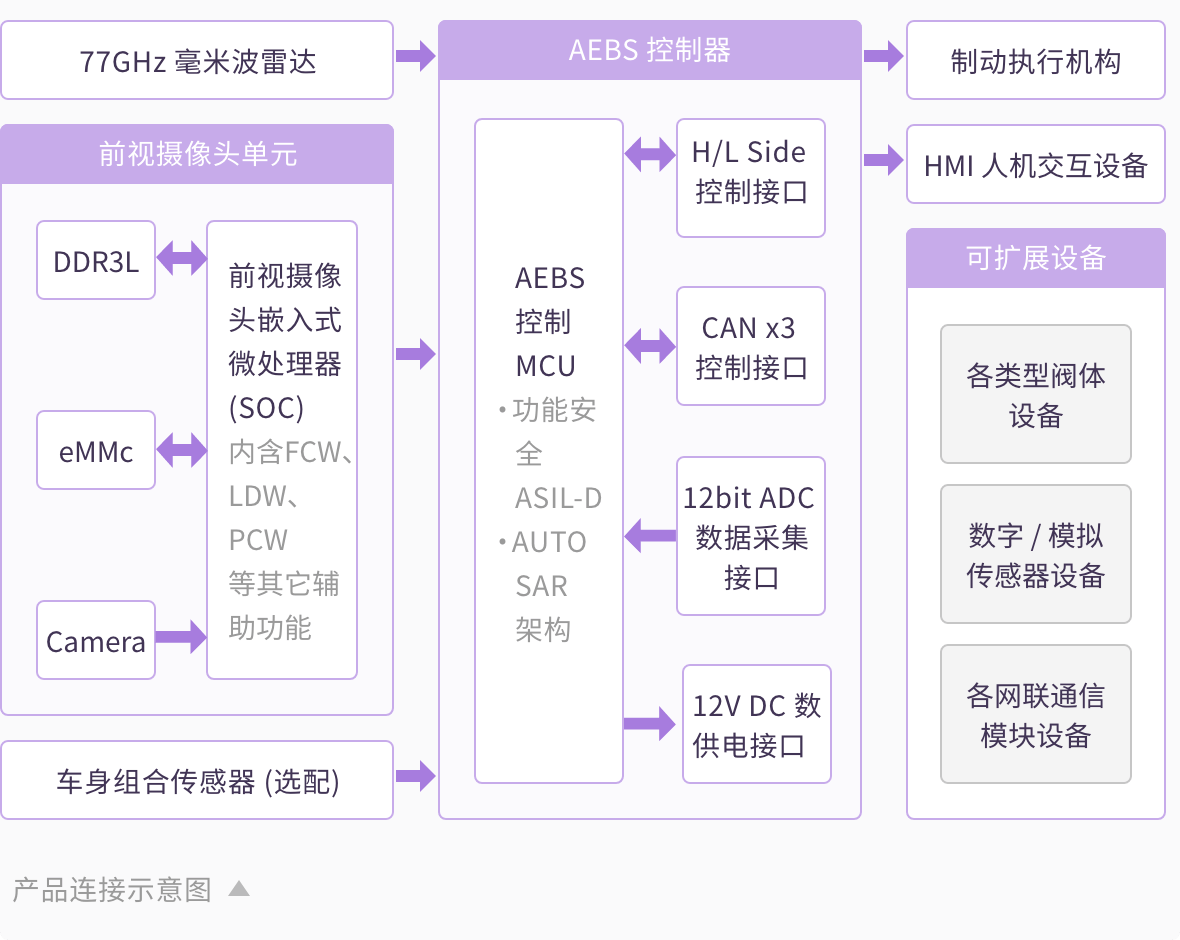
AEBS
商用车自动紧急制动系统
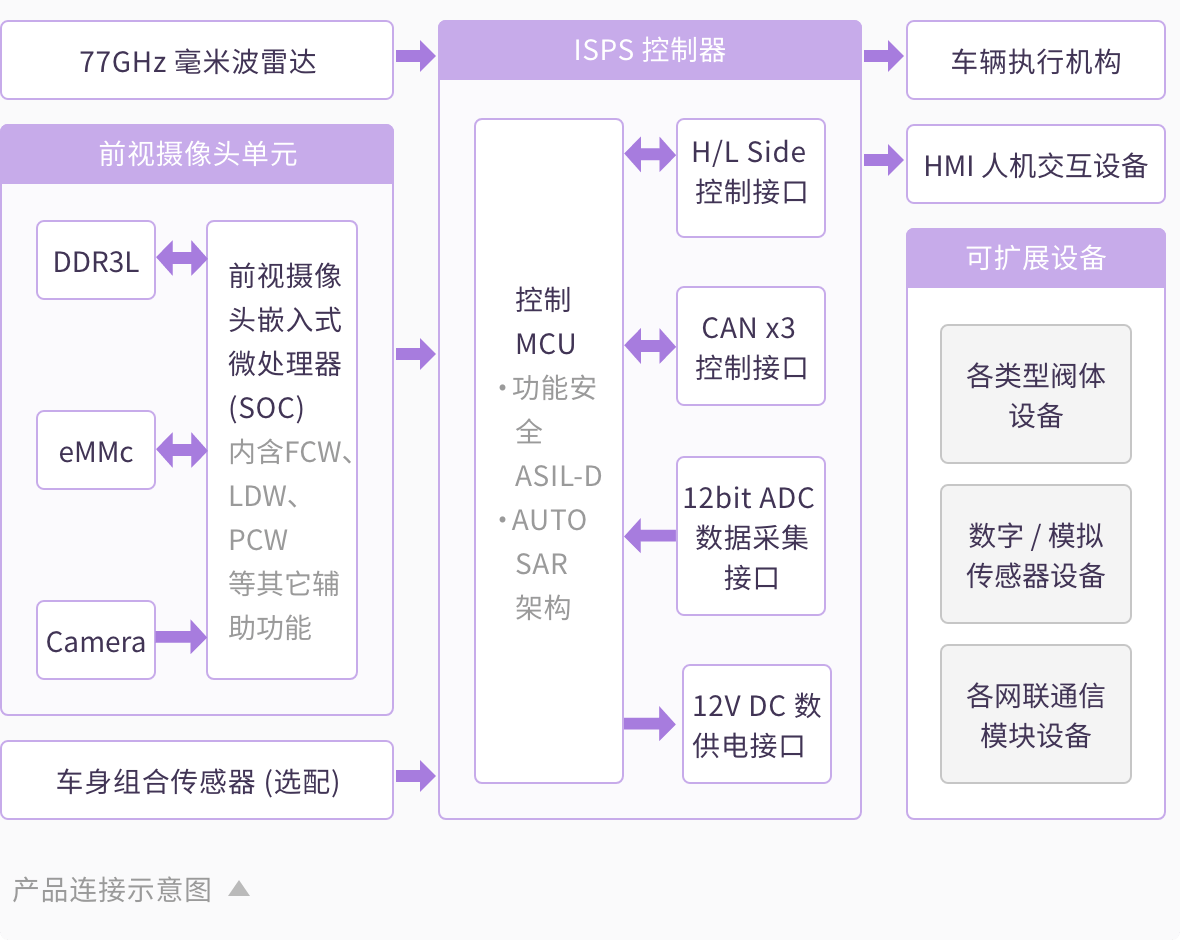
ISPS
商用车智能安全防控系统
AHP
商用车 ADAS 地图传感器













-
 LDW 车道偏离预警
LDW
LDW 车道偏离预警
LDW
-
 FCW 前向碰撞预警
FCW
FCW 前向碰撞预警
FCW
-
 AEB 自动紧急制动
AEB
AEB 自动紧急制动
AEB
-
 PCW 行人碰撞预警
PCW
PCW 行人碰撞预警
PCW
-
 TSR 交通标识识别
TSR
TSR 交通标识识别
TSR
-
 THW 车距检测预警
THW
THW 车距检测预警
THW
-
 CMS 碰撞缓解系统
CMS
CMS 碰撞缓解系统
CMS
-
 EAPM 防误踩油门系统
EAPM
EAPM 防误踩油门系统
EAPM
FAS 商用车前视辅助系统

AEBS 商用车自动紧急制动系统

ISPS 商用车智能安全防控系统

AHP 商用车ADAS地图传感器

本产品为智能网联汽车感知层所研发的车规级高可 靠的地图传感器,能提供预见性地理信息,以提高智 能网联汽车的环境感知和数据融合的能力。

LDW 车道偏离预警

系统通过摄像头检测前方车道线,计算出车身与车道线之间的距离。当驾驶员无意识偏出车道时,系统告警,提示驾驶员回到本车道内,避免危险,系统可输出车道线曲率等信息。
| 工作车速范围 | ≥45km/h (可定制) |
| 工作天气范围 | 白天或照明可见度高的夜晚 |
| 预警形式 | 左右车道偏离预警,支持声、光、震动等多种形式 |
| 车道检测距离范围 | 最大值100m |
| 预警准确率 | >99% |
| 位置距离误差 | <±4cm |
| 道路曲率误差 | <10% |
| 横向检测范围 | 三车道 |
FCW 前向碰撞预警

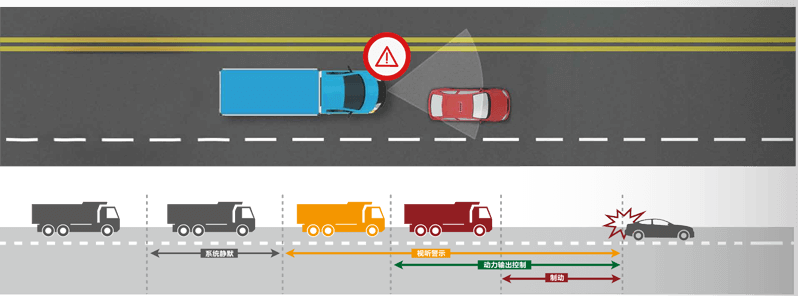
AEB 自动紧急制动

1. 车辆
系统根据前方目标信息和自车状态实时计算人为避撞所需的制动距离和自车的最小制动距离,如判断出无法通过驾驶员操作 来避免的碰撞风险,则车辆通过切断动力输出(加速踏板不起作用),不再响应驾驶员加速需求,并自动施加全部制动力进 行紧急制动以避免或减缓碰撞。
| 系统启动车速 | >5km/h |
| 预警时间 | 3 |
| 预警方式 | 1级黄色灯光闪烁+蜂鸣器, 2级红色灯光闪烁+蜂鸣器+车辆短暂减速 |
| 开始紧急制动阶段 | TTC≤3s,且减速度大于4m/s2 |
| 工作环境温度 | -40℃ — +85℃ |
| 工作电压 | DC 24V |
2. 行人
系统检测到前方行人并警示驾驶员后,驾驶员未作出反应,系统判断出无法通过驾驶员操作来避免的碰撞风险,则车辆通过切断动力输出(加速踏板不起作用),不再响应驾驶员加速需求,并自动施加全部制动力进行紧急制动以避免或减缓碰撞行人。

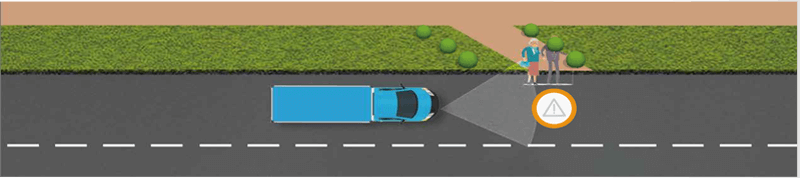
PCW 行人碰撞预警

系统通过摄像头和雷达侦测自车行驶轨迹或同向车道内预行轨迹上的行人,当车辆可能与行人发生碰撞时提前发出警告。适用于多种状态的行人。
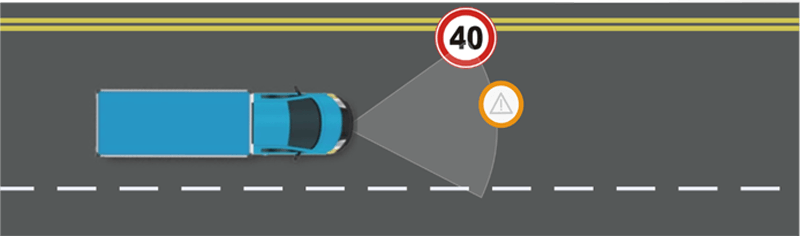
TSR 交通标识识别(选配)

系统对摄像头视野内的限速交通标志进行探测并识别,车速限制可以通过仪表显示给司机。系统发出报警信号,仪表显示限速值,并用图标作为提示,蜂鸣器报警1声2秒。
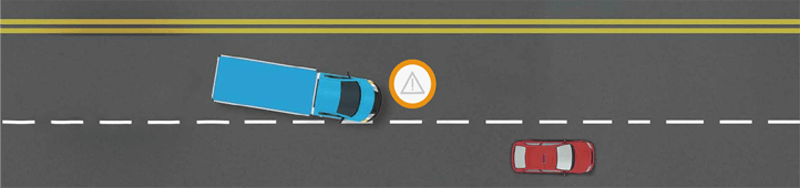
THW 车距检测预警

车距检测预警是检测本车与前车的车距,当车距过近的情况下向驾驶员发出警报的功能。

CMS 碰撞缓解系统

EAPM 防误踩油门系统
